La electrónica de este CNC está basada en una placa arduino uno con el software GRBL 1.1 instalado. A nivel de HW consta del Arduino Uno, los drivers para los motores de pasos, fuentes de alimentación, algún regulador PWM para los Spindlers y un módulo Bluetooth para poder conectarme desde el PC. Adicionalmente le instalé una Raspberry Pi para poder operar el CNC insitu.
Los drivers de los motores de pasos pueden ser cualquiera de los que comercialmente se venden, solo hay que asegurar que serán capaces de aguantar la intensidad que consuma el propio motor. Yo opté por instalar 2 motores de pasos en los ejes X e Y, por lo que el consumo de intensidad es el doble, y debido a esto tome la decisión de instalar unos drivers de 3A basados en el TB6560, son más que suficientes para controlar un par de motores de 0,5A y por otro lado ya tengo la electrónica dimensionada para futuros proyectos donde requiera motores más grande tipo Nema 23 o Nema 34.
Los finales de carrera, son sensores inductivos de 8mm de diámetro, al instalar este tipo de sensor, es necesaria una fuente de alimentación o instalar algún tipo de DC-DC que nos proporcione una alimentación de 6V para alimentar este tipo de sensor. Hay que decir que la instalación de finales de carrera no es obligada, aunque yo personalmente lo recomiendo. Tampoco es obligado instalar este tipo de sensores, se pueden instalar unos finales de carrera mecánicos como los de toda la vida, si escoges esta opción, no es necesario el DC-DC ya que los finales de carrera nos darán 0 cuando sean alcanzados.
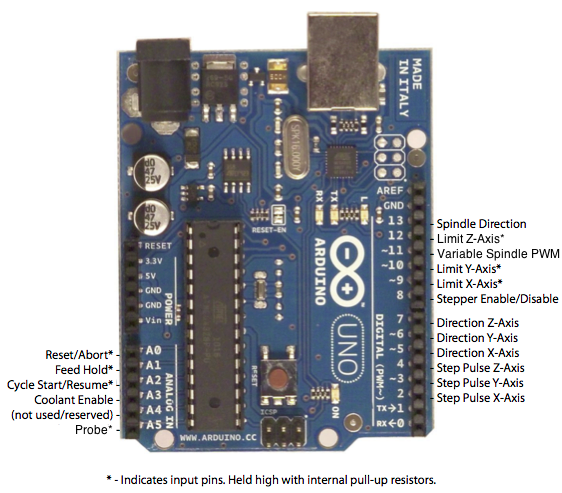
En esta tabla tenéis el ruteado de las conexiones entre la placa Arduino, los drivers, sensores, pulsadores etc…
| Señal | Pin Arduino Uno | Tipo | Destino |
| Reset | A0 | IN | Pulsador |
| Feel Hold | A1 | IN | Pulsador |
| Start | A2 | IN | Pulsador |
| Coolant Enable | A3 | OUT | Rele |
| Probe | A5 | IN | Entrada Sonda |
| Step X | D2 | OUT | Driver X |
| Step Y | D3 | OUT | Driver Y |
| Step Z | D4 | OUT | Driver Z |
| Dieccion X | D5 | OUT | Driver X |
| Direccion Y | D6 | OUT | Driver Y |
| Direccion Z | D7 | OUT | Driver Z |
| Stepper Enable | D8 | OUT | Driver X,Y,Z |
| Limite X | D9 | IN | Salida Sensor inductivo |
| Limite Y | D10 | IN | Salida Sensor inductivo |
| PWM Spindle – Laser | D11 | OUT | Salida PWM 3Khz |
| Limite Z | D12 | IN | Salida Sensor inductivo |
| Spindle Direcion | D13 | OUT | Direccion giro |
El modulo Bluetooth, es una simple pasarela Bt–>Uart conectada directamente a los pines Rx y Tx del Arduino, basta con emparejar el BT con el PC y seleccionar el Puerto serie correspondiente para poder comunicarnos con la máquina. Tener en cuenta que las conexiones son cruzadas, es decir el pin Rx de Arduino, irá conectado al pin Tx del módulo bluetooth y el pin Tx del Arduino irá conectado al pin Rx del Bluetoth.
La instalación de la Raspberry PI, no tiene más, lo único que nos debemos asegurar es conectar la Rasberry Pi con el Arduino mediante un cable USB para poder conectar con la maquina e instalar el SW de control GRBL que más nos guste.